Lihatlah bagaimana tangan robot ini memegang telur, Bantalan jari yang lembut dan dapat ditekuk memungkinkan tangan robot ini menggenggam objek dengan kuat. Laboratorium Biometrik dan Manipulasi Cekatan
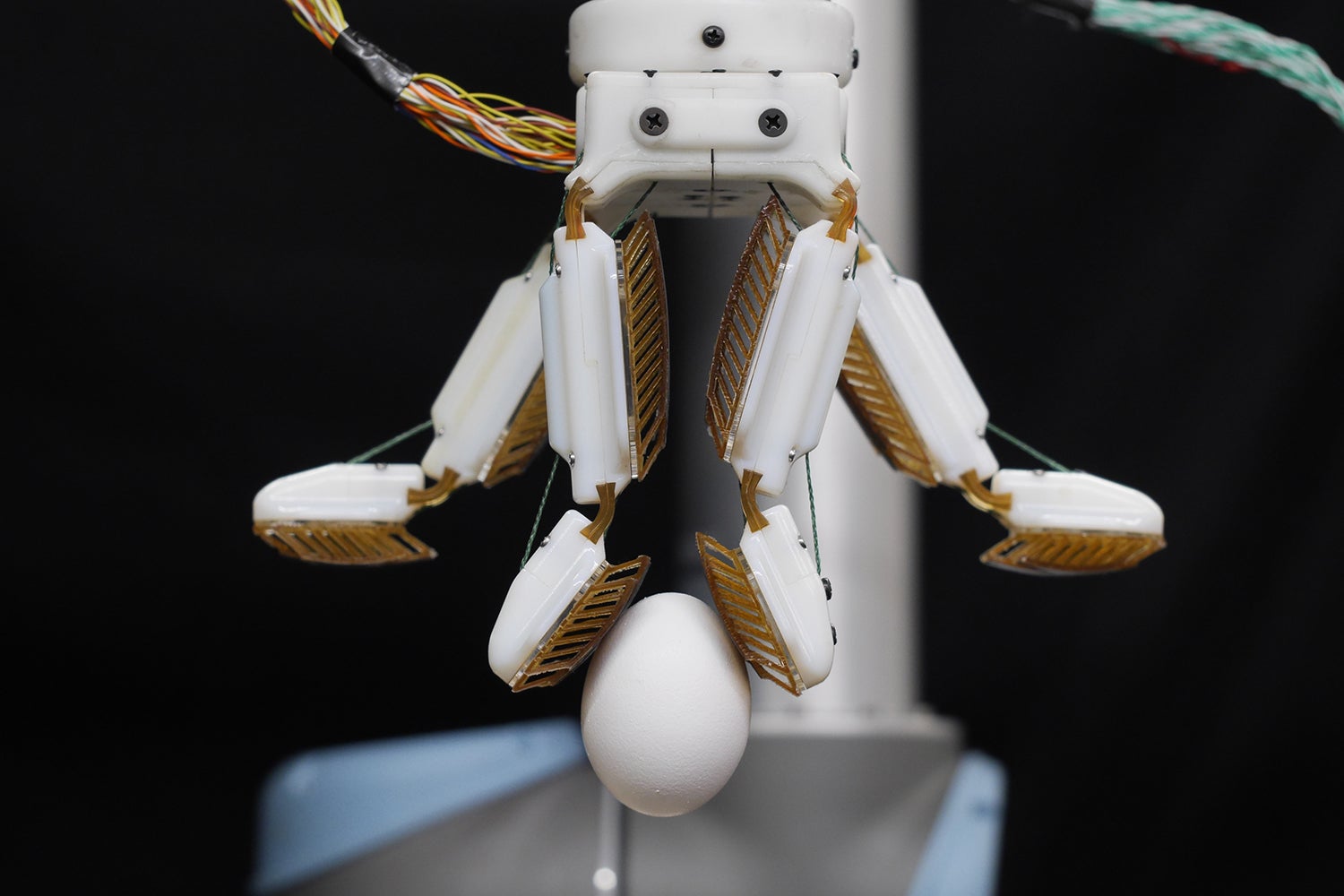
Teknologi.id - Jika tangan menjepit terlalu keras pada sesuatu yang halus, maka bisa menghancurkannya. Tetapi jika tidak memegang objek dengan cukup keras, itu bisa menjatuhkannya. Insinyur Stanford berharap untuk memecahkan masalah ini dengan tangan robotik baru yang dirancang dengan bantalan jari yang dapat mencengkeram seperti tokek. Sebuah studi yang merinci prototipe mereka, farmHand, diterbitkan minggu ini di Science Robotics.
Proyek ini lahir dari Laboratorium Biomimetik dan Manipulasi Dextrous milik profesor teknik Stanford Mark Cutkosky, yang telah difokuskan pada pembuatan bio-inspired robot selama sekitar 30 tahun. Beberapa penemuannya yang paling terkenal adalah robot lengket seperti tokek yang memanjat dinding dan dapat meraih benda di udara. Namun dalam hal ini, "lengket", tidak sama dengan bahan lengket seperti lakban, yang meninggalkan residu bergetah. Ketika Cutkosky mengatakan "lengket," dia mengacu pada jenis lengket yang lebih kering dan lebih kenyal yang memanfaatkan gaya tarik-menarik antara molekul-molekul kecil berkat gaya Van der Waals.
Alih-alih seluruhnya terbuat dari logam, tangan robot ini memiliki ujung jari yang semi licin, dan setiap permukaan bantalan jari terbuat dari lapisan perekat tokek yang didukung oleh struktur seperti tulang karet di bawahnya. Cutkosky membayangkan bahwa dengan tangan seperti ini, suatu hari perangkat tersebut dapat melakukan tugas yang lebih rumit, seperti memetik tomat pusaka.
Baca Juga: Bagaimana Robotik dan Otomatisasi Akan Mengubah Tempat Kerja
Di dunia hewan, jari tokek sebenarnya memiliki fitur mikroskopis: tangkai kecil seperti baji yang meruncing menjadi ujung kecil seperti spatula. “Ketika Anda menariknya dengan cara yang benar, mereka semua berbaring menyamping, dan berubah dari hampir tidak memiliki area kontak menjadi memiliki area kontak secara terus menerus,” kata Cutkosky. “Area kontak yang luas itulah yang memungkinkan gaya van der Waal menghasilkan adhesi.”
Perekat tokek yang dibuat di laboratoriumnya, yang terlihat seperti potongan plastik, adalah tiruan yang disederhanakan dari apa yang dapat dilakukan oleh jari tokek di kehidupan nyata. Tidak seperti selotip, perekat tokek buatan hanya menempel pada permukaan jika anda menariknya dengan cara tertentu—jika tidak maka akan lepas. Itu karena ketika perekat diletakkan di permukaan, hanya ujung-ujungnya yang menyentuhnya, dan hampir tidak ada area kontak. Tetapi ketika strip ditarik ke samping, irisan itu semua berbaring, meningkatkan area kontak. “Ini bekerja dengan baik untuk mendaki,” kata Cutkosky. “Kami telah memikirkan selama bertahun-tahun bagaimana kami dapat menggunakannya untuk aplikasi yang lebih sederhana seperti menggenggam dengan tangan robot.” Untuk mencapai hal ini, tim harus memikirkan bagaimana merancang struktur dan kontrol tangan tersebut sehingga perekat tokek akan selalu berfungsi sebagaimana mestinya, dan tidak kehilangan cengkeramannya. Dan untuk memegang objek dengan benar, tim harus memastikan bahwa semua perekat pada masing-masing jari mengalami dan mempertahankan jenis gaya yang sama atau objek yang coba digenggamnya mungkin terlepas. Salah satu fitur besar yang membuat farmHand efektif dalam meraih dan memegang berbagai benda yang berbeda adalah bantalan setebal beberapa sentimeter yang berada di antara tambalan perekat dan phalange robot, catat Wilson Ruotolo, Ph.D. mahasiswa dari lab Cutkosky dan penulis pertama diartikelnya. Bantalan ini memiliki desain rusuk tekuk dengan balok diagonal melintasi dua permukaan kontak. Ketika kekuatan diterapkan pada perekat, balok-balok itu semua akan mulai melengkung bersama. Desain ini memungkinkan distribusi gaya di semua jari sehingga rata-rata, tekanan yang diberikan setiap jari pada objek yang digenggam adalah sama. Jari-jari robot juga memiliki sensor tikungan yang secara kasar dapat mengukur, di mana jari-jari berada di atas udara. Mereka membantu memposisikan tangan. Tangan robot menggunakan umpan balik dari gaya yang berasal dari motor, melalui tendon dan menuju jari untuk memperkirakan seberapa keras atau lunak suatu benda secara umum dan zona gaya yang tepat untuk digunakan di atasnya. Ruotolo berharap untuk mengintegrasikan lebih banyak sensor ke generasi berikutnya dari tangan robot, mungkin sensor yang dapat mengukur sentuhan. “Laboratorium kami juga membuat sensor taktil sehingga akan bagus untuk mengintegrasikannya di belakang bantalan sehingga anda tidak hanya dapat mendeteksi seberapa besar kekuatan yang anda genggam, tetapi juga seberapa banyak area kontak yang anda miliki,” kata Ruotolo. Itu akan memungkinkan robot untuk secara dinamis menyesuaikan genggamannya berdasarkan kondisi kontak yang dideteksinya pada objek yang berubah-ubah. Perekat sangat penting untuk memiliki tangan robot yang dapat menggenggam dengan kuat namun lembut. “Anda dapat melakukan sesuatu di mana anda mengerahkan gaya tarik yang cukup tinggi tanpa banyak gaya tekan,” kata Ruotolo. “Dan jika Anda membayangkan memetik buah dari pohon anggur, apa yang ingin anda lakukan adalah memelintir dan menarik tanpa meremas sama sekali.”
(MYAF)

Tinggalkan Komentar